Inhoudsopgave
Een aantal regels zijn ieder jaar gelijk. De belangrijkste regel is, dat de robots volledig autonoom moeten werken. Dit betekent dat de robot dus volledig zelfstandig de wedstrijd moet spelen, zonder dat hij daarbij geholpen mag worden.
Sinds 1998 is er naast de 'Coupe de France de Robotique' waar uitsluitend Franse teams aan meedoen, ook een wedstrijd waar teams uit Europa aan meedoen, 'Eurobot' geheten. En al sinds de eerste keer dat het kon, heeft een team van studenten van de TUE meegedaan met de wedstrijden, die ieder jaar in La Ferté-Bernard gedurende een weekend in mei gespeeld werden.
Voor de TUE werken de studenten aan de robots in de vorm van een project. Hieraan werkt een groep van 10 tot 15 mensen uit verschillende studierichtingen om de robots te ontwerpen en te produceren. Ieder jaar is dat een andere groep mensen om op die manier veel studenten de gelegenheid te bieden praktijk ervaring op te doen.
Eurobot 1999
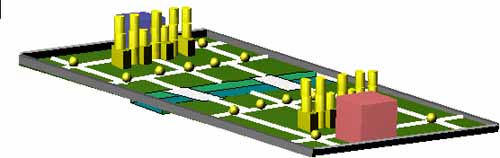
In 1999 was het thema van 'kasteel veroveren'. Op een tafel van 3,2
bij 2 meter staan twee kastelen opgebouwd. De bedoeling is om een of meerdere
robots te bouwen die het kasteel van de tegenstander omver kunnen gooien,
terwijl het eigen kasteel verdedigd wordt.
Net als in 1998, deed ook in 1999 een team van de TUE mee met de wedstrijd die op 16 mei 1999 gehouden werd in La Ferté-Bernard (Zo'n 150 kilometer ten zuid-westen van Parijs) in Frankrijk. Het TUE Eurobot '99 team bestond uit 13 studenten van de faculteiten electrotechniek, werktuigbouwkunde en wiskunde & informatica.
Het speelveld bestaat uit :
|
|
|
|
|
|
|
|
De verdediging
De verdediging
Als verdediging hebben we gekozen voor het inpakken van de torens.
Dit laten we doen door de grote robot zodra die de 4 kleine robotjes heeft
vrijgelaten. Op dat moment heeft de grote robot ruimte over om de blokken
in te pakken. We hebben gekozen voor grijpers in plaats van schuiven omdat
dit minder risicovol is. Een scherm bleek onmogelijk omdat de robot niet
groter dan 40 x 40 cm mocht worden waardoor het scherm maximaal 40
* Ö2 = 56,6 cm mocht worden. Dit is te
kort om alle torens te beschermen.
De aanval
De aanval werd gedaan door de 4 kleine robotjes. Deze hebben we onderverdeeld
in 2 groepen van 2 robotjes met ieder hun eigen manier van aanvallen. De
eerste groep probeert zo snel mogelijk naar de overkant te komen en daar
de torens om te duwen door er tegenaan te rijden. De tweede groep robotjes
verzamelt de tennisballen en probeert die tegen de torens aan te schieten.
De Tafel in trilling brengen leek ons geen goed idee. Bovendien hadden
we geen plaats meer voor het tril systeem.
Vervoer naar de overkant
Voor de grote robot en de 2 schiet robotjes hoeven we niet naar de
overkant. Voor de 2 duw robotjes geldt dat we zo snel mogelijk over de
bruggen proberen te rijden, voordat vijandelijke robots de bruggen blokkeren.
Tevens worden ze met sensoren uitgerust om eventuele obstakels te vermijden.
De taak
van een informaticus
Informatica & Wiskunde is bij dit project nodig voor de besturing
van de robotjes. Hierbij zijn er 2 werkgebieden, namelijk het operating
system en de algoritmes voor het berekenen van routes. Het operating system
zorgt ervoor dat alle programma's naast elkaar kunnen werken en dat alle
invoer uit sensoren en uitvoer naar motoren synchroon lopen. De algoritmes
vormen het brein achter de robots zodat ze weten welke strategie ze moeten
gebruiken en welke route ze moeten rijden. Hiernaast moet er ook nog software
geschreven worden voor het direct aansturen van de grijpers, het schietmechanisme
en de motoren en sensoren.
Als informaticus heb ik me voornamelijk bezig gehouden met het bedenken van het programma die de routes voor de robots kan berekenen. Dit is een voorbeeld van een route die het programma berekend heeft.
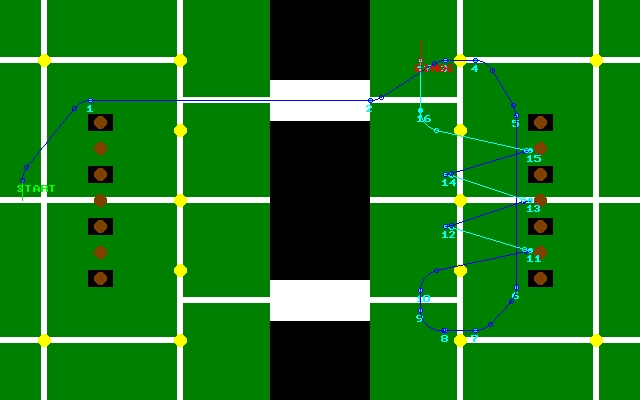
Klik op de tekening om de ware grootte te zien (640 x
400)
Alle software word in het geheugen van de robotjes gezet. Het geheugen en de processor zijn van een aparte voeding voorzien zodat een tijdelijke spanningsval geen storing op de programma's geeft.
De wedstrijden
Er hadden zich in totaal 11 teams aangemeld voor de Eurobot wedstrijd,
namelijk 3 uit Frankrijk (de winnaars van de Franse finale van zaterdag
15 mei), 3 uit Zwitserland, 2 uit Denemarken, 1 uit Italie en 2 uit Nederland.
Vlak voor de wedstrijden bleek dat de hardware van de motoren haperde. Af en toe deden de motoren het goed, maar vaak vielen ze uit doordat bepaalde IC's kapot gingen. Hiervan hadden we wel reserve IC's maar niet genoeg voor alle wedstrijden. Tevens bleek dat de processoren niet krachtig genoeg waren om de berekeningen voor de routes real-time uit te voeren. Daarom hebben we besloten om de software op een externe PC te zetten en net voor iedere wedstrijd de routes in de robots te programmeren.
Ondanks de problemen hebben de robotjes redelijk gepresteerd. Ons team heeft uiteindelijk een gedeelde 7e plaats behaald. Door een hoop pech deed geen enkele van de robots wat ze moesten doen. De uiteindelijk winnaar is het team van IUT Ville d'Avray uit Frankrijk geworden, hetzelfde team dat ook Eurobot '98 gewonnen heeft.
Meer informatie
Meer informatie is te vinden op internet :
| Eurobot | http://eurobot.win.tue.nl |
| Foto's | http://eurobot.win.tue.nl/index99f.html |
| Verslagen | http://eurobot.win.tue.nl/99/verslagen (alleen vanaf de TUE te bekijken) |
| Regelement | http://anstj.mime.univ-paris8.fr/robotique/COUPE_E=M6/reglee99.html |